En ocasiones cuando se ejecuta una operación de vuelo con UAVs se necesita realizar cambios en tiempo real, debido a la detección de alguna clase de evento en el área de la misión o por cualquier otra causa. Por ello disponer de un UAV con la capacidad de vuelo improvisado resulta de gran importancia, capacidad aportada por el Autopiloto Veronte y el software de control Veronte Pipe.
Posibilidades del vuelo improvisado en un UAV
El Autopiloto Veronte integra un DEM (Digital Elevation Model) embarcado, lo que le posibilita para recalcular rutas de forma autónoma evitando colisiones con el terreno. Esta capacidad de vuelo improvisado que permite misiones y rutas de vuelo totalmente editables durante la operación lo consigue mediante diversos comportamientos:
- Las misiones son configuradas con waypoints y curvas, si se desea es posible editar las mismas durante la operación, se puede volar de manera automática entre los distintos tramos formados por estos waypoints y curvas en la ruta, alterando de este modo la ruta original preestablecida.
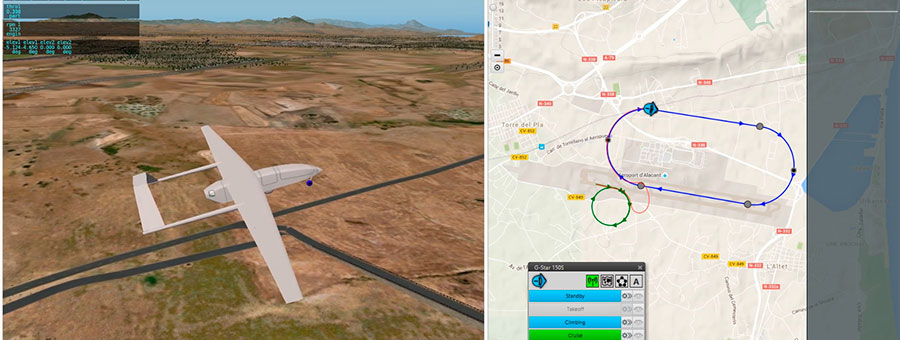
- En el momento de detectar algún tipo de evento durante la operación, es posible comandar el UAV directamente a un punto en el mapa y permanecer sobrevolando un punto fijo (Fly-to) o volar realizando círculos alrededor de dicho punto (Fly-to & Loiter). Permitiendo así sobrevolar rápidamente el área de interés.
- Existe la capacidad de configurar distintas rutas y decidir en el último instante cuál de ellas seguir. Esta decisión la puede realizar el operador de la misión en cualquier situación, o se pueden programar decisiones avanzadas en función de una o más variables del sistema. Estas decisiones avanzadas pueden estar basadas por ejemplo en el nivel de batería para seleccionar una vuelta a casa por el camino más óptimo o si la velocidad del viento estimado es elevado se puede cambiar a una ruta de menor altura, etc…
En conclusión con el vuelo improvisado un UAV adquiere una enorme versatilidad gracias a disponer del software de control Veronte Pipe. Adquiriendo capacidades como evitar colisiones mediante la detección de la elevación del terreno o la definición de obstáculos, que el sistema no tripulado evitará a la hora de calcular la nueva ruta, y en su defecto siempre se puede tomar el control manual o manual asistido en cualquier momento durante el vuelo.